A study published in Advanced Materials Technologies by researchers Anwar Elhadad, Yang Gao, and Seokheun Choi introduces an innovative system for compact aquatic robots that leverages natural processes for technological progress. This research sets new benchmarks in the design of autonomous systems, particularly in the realm of marine monitoring and exploration within the Ocean Internet of Things (IoT).
Aquatic mobile robots have the potential to revolutionize marine monitoring by providing cost-effective and sustainable solutions for environmental data collection. One of the significant challenges for these untethered robots, especially in remote areas, is achieving energy autonomy. Elhadad and his team addressed this challenge by developing a self-sustaining energy system inspired by biological digestion processes. Utilizing microbial fuel cell (MFC) technology, the system converts organic materials found in aquatic environments into electricity through catalytic redox reactions.
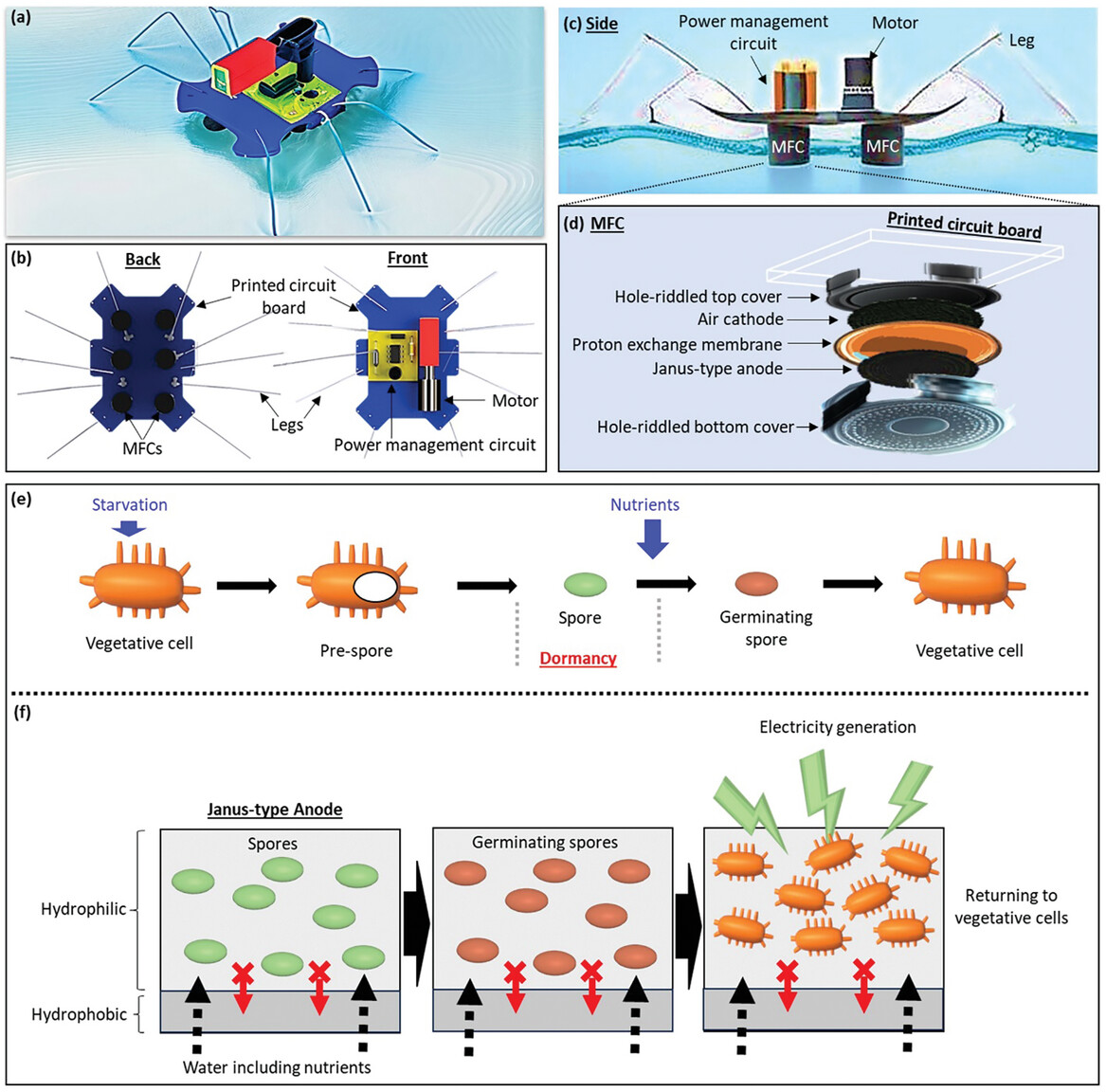
The key innovation lies in the use of spore-forming Bacillus subtilis as the anodic biocatalyst. Bacillus subtilis can endure harsh conditions and reactivate in favorable environments, which significantly enhances the MFC’s longevity. This bacterium’s ability to form spores ensures the system’s resilience and sustained operation even in varying environmental conditions. The research team integrated a biomimetic Janus membrane with asymmetric surface wettability to ensure a steady supply of organic substrates for microbial viability. This membrane enables selective substrate intake, mimicking natural processes seen in cacti and lotus leaves.
Elhadad explains, “Our approach leverages the unique properties of Bacillus subtilis to create a robust and efficient energy system. By using a Janus membrane, we ensure that the aquatic robot can maintain a consistent intake of nutrients, which is crucial for the MFC’s performance.”
The study demonstrates the feasibility of using these natural processes in a compact and efficient design. The robotic system developed by the team mimics the movement of water striders, allowing the robot to move efficiently across water surfaces. This is achieved through a motor powered by microbial metabolism, fueled by organic nutrients via the Janus membrane. The researchers highlight the simplicity and practicality of their solution, which does not require complex communication systems between robots. Instead, the robots rely solely on onboard sensors and cameras, reducing computational load and enhancing practical deployment.
In a series of experiments, the team tested the robot’s performance in various scenarios, demonstrating its ability to avoid obstacles and navigate complex environments autonomously. The robot’s lightweight design, coupled with enhanced buoyant force from spider-like legs, allows it to glide across water surfaces efficiently. This bio-inspired design opens up new possibilities for the deployment of aquatic robots in marine ecosystems, offering significant contributions to environmental monitoring, disaster response, and navigation.
The integration of microbial fuel cells into the robot’s design marks a significant step forward in the development of autonomous systems. Traditional energy harvesting methods, such as solar and kinetic energy, often need to be improved in marine settings due to variable availability. In contrast, the MFC technology provides a reliable and continuous energy source, harnessing the high energy density of organic substrates in aquatic environments.
Elhadad emphasizes the importance of this innovation: “Our research not only provides a sustainable energy solution but also demonstrates the potential for integrating biological processes into technological applications. This approach can significantly reduce the environmental impact of robotic systems and enhance their operational capabilities.”
The practical implications of this research are vast, with potential applications ranging from oceanic exploration to environmental surveillance. The autonomous energy system ensures that robots can operate in remote and hard-to-reach areas without the need for frequent maintenance or energy replenishment. This autonomy is crucial for long-term environmental monitoring and data collection.
Furthermore, the researchers plan to explore additional capabilities for their robotic platform, such as localization, sensing, and signal processing. These enhancements will enable the robots to perform more complex tasks and provide more detailed environmental data. Future research will also focus on improving the efficiency and scalability of the MFC technology, making it suitable for a broader range of applications.
In conclusion, the study by Elhadad, Gao, and Choi represents a significant advancement in the field of aquatic robotics. By integrating advanced biomimetic strategies and sustainable energy systems, the researchers have created a platform that sets new standards for autonomous robotic design. This work not only showcases the potential of natural processes in technological innovation but also paves the way for future developments in robotic exploration and environmental preservation. For more details, here is the related article.