The ocean’s depths have long been mysteries, from undiscovered species to hidden shipwrecks, but technological advancements are bringing the sea’s secrets closer to the surface. A new breakthrough in underwater robotic technology promises to reshape how we explore and monitor the underwater world. This innovative approach to underwater object detection and tracking brings new levels of accuracy, efficiency, and real-time processing, paving the way for a future where underwater exploration and environmental monitoring are smarter and more effective.
Why is underwater object detection so challenging?
Detecting and tracking objects underwater is a notoriously difficult task. Environmental conditions such as low light, high levels of background noise, and murky waters that obscure visibility present challenges. These factors make it tough for underwater robots, which rely on cameras and sensors, to accurately identify and follow targets such as marine species, coral reefs, or even man-made structures like underwater pipelines.
With varying degrees of success, we have employed traditional object detection models like YOLOv3, YOLOv4, and Faster R-CNN, but they struggle with the unique demands of underwater environments. The challenge of identifying small or faint objects arises due to noise interference. The new SVGS-DSGAT model offers a solution, combining cutting-edge deep learning techniques with the power of IoT (Internet of Things) to overcome these hurdles.
How does this new robotic technology work?
The SVGS-DSGAT model employs advanced technology to enhance the accuracy and reliability of underwater object detection. It includes three key components. The first component, GraphSage, helps the system process complex underwater visuals by extracting critical details and eliminating unnecessary noise. The second component, called the Saliency-Guided Visual Attention Module (SVAM), directs the system’s focus to the most important parts of an image, much like how our eyes naturally spot movement or key details in a busy scene. This ensures the system can focus on the most relevant features, improving its ability to detect objects. Lastly, the Difference Similarity Graph Attention (DSGAT) module fine-tunes the data by comparing and highlighting both differences and similarities, helping the system better distinguish objects from the background, which is especially useful for tracking small or hidden objects. Together, these components create a powerful system that works well in the challenging conditions of underwater environments.
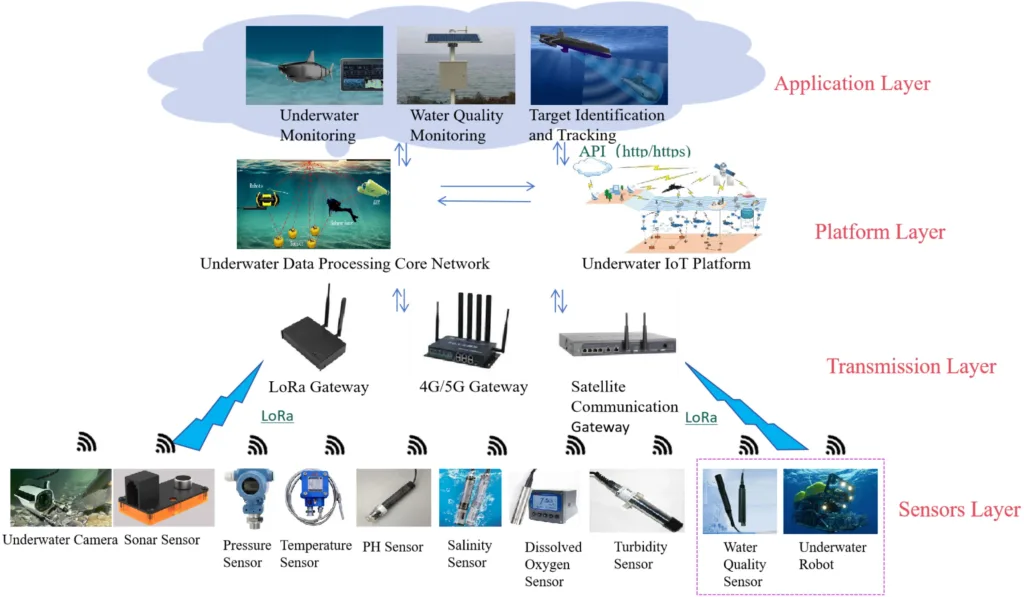
An underwater IoT framework, integrating sensors, data processing, and communication systems to support applications such as underwater monitoring, water quality tracking, and target identification. credit: https://doi.org/10.1016/j.aej.2024.08.101
One of the most exciting aspects of this model is its integration with IoT technology. By enabling underwater robots to communicate in real-time with surface control centers and other connected devices, this model drastically improves the speed and efficiency of underwater operations.
For example, an IoT-enabled underwater robot could transmit data about marine life to a surface control center in real time, allowing scientists to make immediate decisions about where to explore next. This kind of instantaneous communication is key for applications like marine biodiversity surveys, oil pipeline inspections, or even deep-sea exploration.
According to Dr. Dongli Wu, one of the lead researchers on this project, “By incorporating IoT, we enable real-time data processing and transmission, which allows for more responsive and dynamic underwater operations. This is a critical step toward smarter ocean monitoring.”
The benefits of this new technology extend beyond academic interest or industrial applications. SVGS-DSGAT has the potential to greatly benefit environmental monitoring. Marine pollution, climate change, and overfishing are global concerns, and accurate, real-time monitoring of ocean health is essential for managing these issues. With this model, we can get better data faster from previously inaccessible or challenging locations.
Additionally, industries such as oil and gas, underwater construction, and defense are constantly seeking more reliable and efficient ways to monitor underwater environments. For instance, the technology could identify leaks in underwater pipelines or monitor submarine movements, thereby providing cost savings and enhancing safety.
The real promise of the SVGS-DSGAT model is its potential to revolutionize ocean research, as demonstrated in the image below. Scientists will be able to explore deeper, stay connected with live data feeds, and detect species or structures that would have otherwise gone unnoticed. The ability to gather accurate data in real time can significantly accelerate discoveries and solutions to marine challenges.
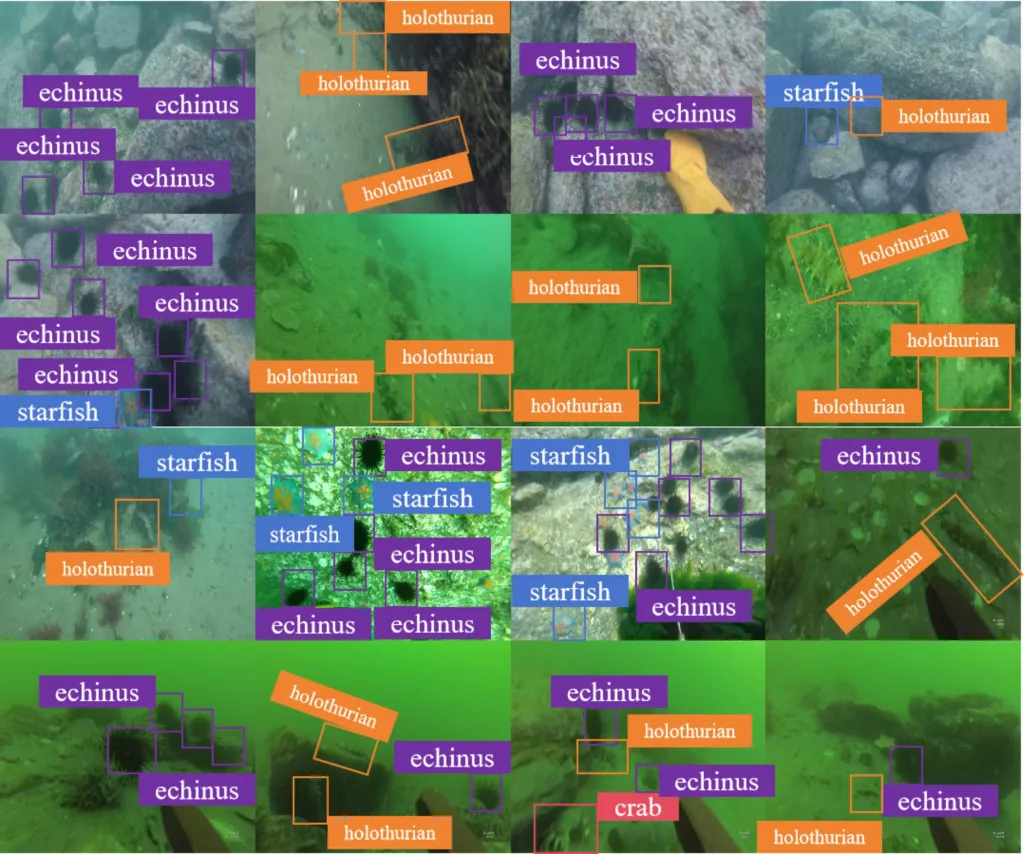
Some of the promising results of that deep learning model. Accurately identifying marine species such as echinus, holothurians, starfish, and crabs in various aquatic environments.
While the SVGS-DSGAT model is already outperforming existing technologies, the research team isn’t stopping there. Future developments could include enhancing the model’s ability to work in even more extreme underwater environments or refining it for more specific tasks, such as identifying individual species or mapping intricate underwater habitats.
There’s also potential for multimodal integration, which combines this technology with other sensors like sonar or lidar to provide even richer data about underwater environments. “The potential for combining SVGS-DSGAT with other technologies is vast,” explains Ling Luo, another key researcher in the project. “By integrating multiple data sources, we can create an even clearer and more accurate picture of what lies beneath the surface.”
As the Internet of Things (IoT) keeps getting better with 5G and 6G networks, communication underwater will get faster and more reliable. This will make SVGS-DSGAT technology even more useful in the majority of cases.
For more information, Visit: https://doi.org/10.1016/j.aej.2024.08.101